【PFTrack教程】如何反求定点摇动摄像机运动轨迹?(gif图文详解)
› VFX大学 › PFtrack,3DEqualizer,Mocha追踪 › 【PFTrack教程】如何反求定点摇动摄像机运动轨迹?(gif图文详解)
标签: Camera Solver, PFtrack, User Track, 参考镜头, 摄像机反求
- This topic has 14 个回复, 5 个参与人, and was last updated 4年, 10个月 前 by
 追光.
追光.
-
作者帖子
-
-
2018-01-10 - 14:55 #31172
在之前的 PFTrack 教程中,追光和大家讲过反求一般摄像机运动的方法,但是对于一些特殊的镜头,简单办法还是无法解决的,比如追光今天要讲的摄像机定点摇动。本帖会和大家一起分享什么时候会出现摄像机定点摇动,以及遇到这样的镜头我们应该如何解算反求。
-
2018-01-10 - 15:23 #31175
1. 什么是定点摇动(英文术语为 Nodal Pan)?
大家想象一下,如果摄像机固定在三脚架上,而三角架固定不动,那么摄像机就只能定点摇动。那么这种镜头的反求难点在哪里呢?无论跟踪点离摄像机多远或者多近,这样的摄像机运动都不会为跟踪的特征点提供视差。如果没有视差,Camera Solver 就无法确定跟踪点的距离。最后,所有解算出来的特征点与摄像机的距离全部一样。
——————
在 PFTrack 中解算定点摇动(Nodal Pans)
不过幸运的是,大多数三脚架镜头都不是真正的定点摇动。因为如果定点摇动绝对不产生视差的话,三脚架的旋转中心必须是摄像机的光学中心,通常只有专业三脚架和平衡环才能做到。
在 PFTrack 的 Camera Solver 中,Translation 参数中有一个 Off-Centre,如果三脚架的旋转点轻微偏理摄像机真正的光学中心,可以使用这个参数设置。这个参数是专门用来解决这个问题的。但是如果是真正的围绕光学中心旋转的定点摇动,我们应该讲 Translation 设置为 None。
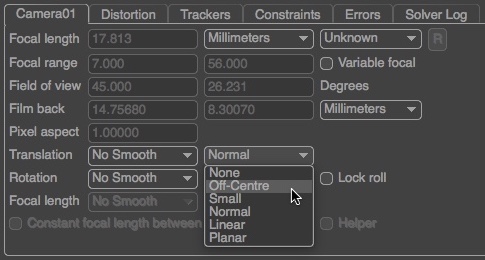
使用 Off-Centre 还可以为许多三脚架镜头提供有用的 3D 信息。不过如果是真正的定点摇动,就只能使用下面追光要讲到的方法啦。
-
2018-01-10 - 16:16 #31196
2. 使用参考图像跟踪定点摇动
先给练习素材:
——————
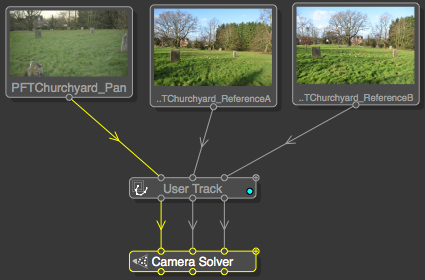
导入片段 PFTChurchyard_Pan,以及两个参考图像 PFTChurchyard_ReferenceA 和 PFTChurchyard_ReferenceB,将它们连接到 User Track 节点上。
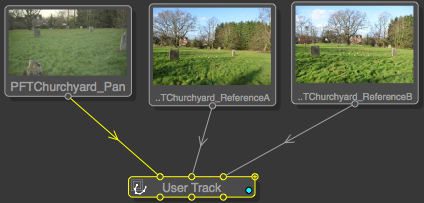
现在我们马上要使用参考图片来解算主摄像机了。这里追光提醒大家,这里添加的的视角是辅助解算主摄像机的,必须是单一静帧,或者是静止、锁定的片段(没有任何运动)。
——————
创建一个用户跟踪点
点击 Create 按钮,并在矩形墓碑上的一个白点上创建第一个跟踪点。

调节跟踪窗口和搜索窗口的大小。

——————
跟踪用户跟踪器
按 Centre View 按钮,使当前选中窗口保持在 Cinema 中央,以便查看跟踪质量。然后点击 >> 按钮向前跟踪跟踪点。

由于跟踪点的位置不同,跟踪有时候可能在到达终点之前就中止了。这是因为匹配分数太低(匹配分数是用来表示当前帧和跟踪器参考图匹配质量的数值)。Failure threshold 参数定义低于哪个值就表示匹配分数太低。如果需要的话,可以调节跟踪点的位置。手动定位跟踪点后,点击 Polish 平滑犹豫重定位可能导致的跳动。
关于跟踪技巧,追光在之前的帖子中详细讲过了,大家可以参考下:
——————
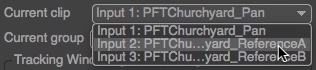
在参考图片中放置跟踪点
我们可以使用 User Track 节点中的 Current clip 菜单在不同输入之间切换。这里我们选择第一个参考图像 <i>PFTChurchyard_ReferenceA</i>。
在 Cinema 中定位到墓碑上的同一个白点,如果需要的话,可以在 Tracking Window 中调节跟踪器的位置。

此时,我们的跟踪列表中应该只有一个跟踪器 Tracker0001。务必确认在片段和参考图像上放置的是同一个跟踪点!
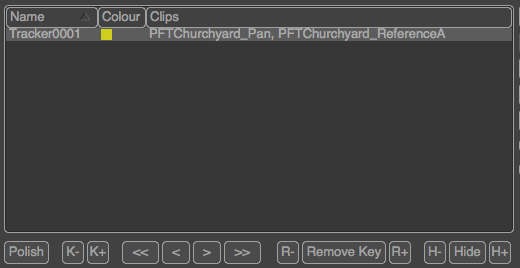
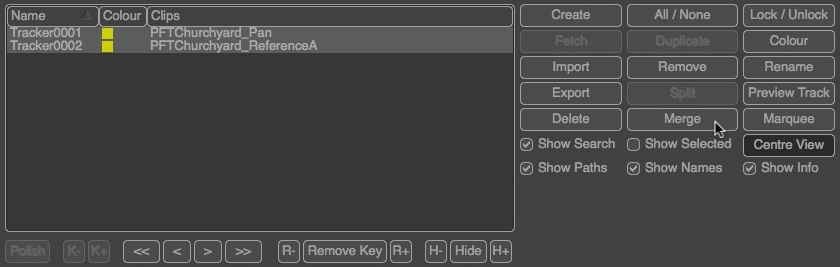
在切换输入端之后,我们必须确保选中的跟踪器是之前片段中跟踪过的。否则的话,我们就会创建一个新的跟踪器。如果已经这样了的话,我们可以选中两个跟踪器,点击 Merge 按钮,将它们合并到一个跟踪器中。
重复上面的操作,在第二个参考图像上放置跟踪点。选择 Centre View 按钮,在片段和参考图像之间切换,我们可以快速检查每个视角的位置。
——————
创建剩余的跟踪器
点击 Create 在三角形墓碑顶点上放置第二个跟踪器。
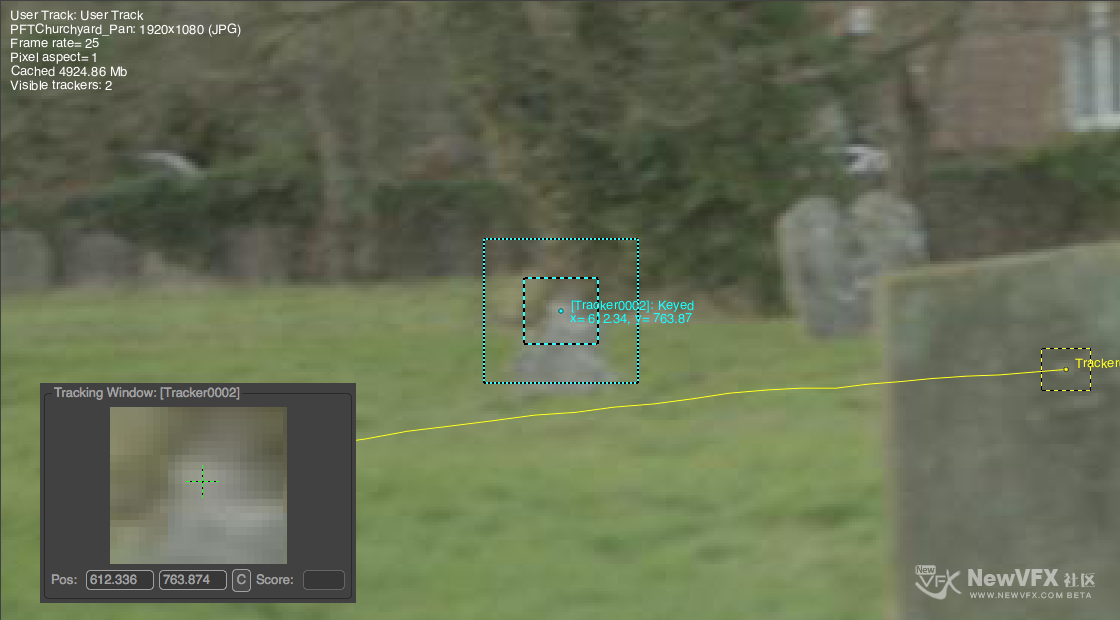
点击 >> 按钮向前跟踪。这个特征点从第45帧开始就出画了,所以跟踪应该在第44帧自动停止。跟踪停止后,跟踪点在45~50帧之间还是激活的(在时间线上用深红色表示,蓝色表示激活且已跟踪)。

跟踪器并不为最后6帧提供有效信息,所以要保证在这些帧上,该跟踪器不对摄像机解算有影响。我们可以点击 H+ 按钮,隐藏这些帧上的跟踪器。
另一种隐藏跟踪器的方法是 Hide 按钮,只隐藏当前帧上选中的跟踪器;H- 按钮会隐藏当前帧以前所有帧上的跟踪器。
同样在参考帧上放置跟踪器。最终完成的效果是这样的——

-
2018-01-10 - 16:25 #31201
3. 使用参考帧解算场景
创建一个 Camera Solver 并连接 User Track 节点的三个输出。
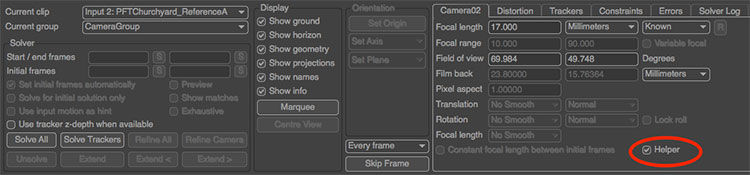
使用 Current clip 菜单切换到一个参考帧上,由于这些是单个参考帧,所以 Helper 复选框是自动勾选的。这样可以保证这些输入使用来辅助解算主摄像机的。
点击 Solve All 解算场景。
解算完成后,我们可以在透视图或正交视图中检查场景。注意跟踪器是如何与摄像机保持正确距离的,而且主摄像机和静帧图像的位置都解算到场景中了。

-
2018-01-10 - 16:32 #31203
4. 没有参考帧能否得到 3D 信息?
如果没有参考帧,RGBD 摄像机在解算定点旋转时也可以提供帮助。RGBD 摄像机同步记录深度和色彩信息,可以提供由于视差缺失而丢失的深度数据。
PFTrack 可以利用 RGBD 摄像机的深度信息,连接一个 Z-Channel 节点,为 Auto Track 和 User Track 节点创建的跟踪器分配深度值。
-
2018-01-10 - 16:45 #31205
如有疑问,可以跟帖留言,追光会尽快回复噢。
如果喜欢追光的帖子,点击我的头像,加我为好友,就可以看到我得更新啦,也可给我发私信,点击帖子顶部得收藏放入收藏夹,方便将来再次查看~
本帖未经允许不得转载,禁止二次转载,转载请注明出处并保留在本站的完整链接,谢谢!
-
2018-08-12 - 13:39 #48451
老师您好我是刚接触PFtrack的新人 跟着教程看了些视频但是输出遇到了大问题,就会输出到MAYA中 摄像机正对的序列不动 只有摄像机 跟重点什么的在动 那个序列不好使,但是看视频他们输出都特别简单而且没问题
-
2018-08-12 - 15:00 #48456
Pfrack 是原生支持Maya的啊,你设置应该有问题。 你也可以导出 .abc .FBX 分别导入Maya。 我们每天导入导出到houdini,Nuke 都没有过任何问题的。你可以导入到 AE,C4d 都试试~~~
-
-
2018-10-02 - 23:07 #49083
您好我想问一下问什么要连接三个素材 另外两个是有什么作用呢 一般都什么情况才能连接多素材进行结算呢
-
2018-10-11 - 23:14 #49140
另外两个素材是参考图片,只能是静帧,用来协助主机位解算被摄物与摄像机之间的距离的。
本帖是解算【定点摇动】摄像机的教程,并不是所有解算摄像机运动轨迹的都用这种方法。
-
-
2020-01-15 - 09:10 #71061
我通过参考帧来辅助固定摇镜头,得出的解算结果很乱,镜头会剧烈摇晃乱飞
-
2020-01-15 - 09:54 #71062
你可以把素材下载下去练习下,这些素材都是经过 PFtrack 官方测试过的,方法步骤按照本教程中的操作一遍~~
-
-
2020-02-07 - 13:32 #71196
就是方碑的位置不正确,在远离其它碑的后面,是哪的问题?
Small linear planar normal适用什么样的镜头轨迹? -
2020-02-07 - 20:51 #71202
方碑的跟踪点问题解决了,这方法对定点摇镜的地面的跟踪点可行吗?感觉难跟准
-
2020-02-07 - 22:51 #71205
这种方法是专门针对定点摇摄的镜头进行跟踪的,但是拍摄方法也需要按照文中特定的方法拍摄,如果前期没有拍摄参考图,跟踪出来的结果很不准确。
-
-
-
作者帖子
- 在下方一键注册,登录后就可以回复啦。
